- Home
- Product Categories
- Sensors
- Gyro Breakout Board - LY530AL - 300°/s

{kind=link}
Gyro Breakout Board - LY530AL - 300°/s
Replacement:SEN-10100. The new revision corrects issues with the high pass filter. This page is for reference only.
This is a breakout board for the ST's single-axis LY530ALH gyro. The LY530ALH measures angular velocity along the yaw axis with a full scale of ±300°/s. Two different analog outputs are provided for the z-axis - one 1x amplified and the other 4x amplified.
A regulated voltage between 2.7 and 3.6VDC should be supplied to the power pins. We have the filtering circuits all set up, so you'll just need to connect the outputs to an ADC, and you're ready to go.
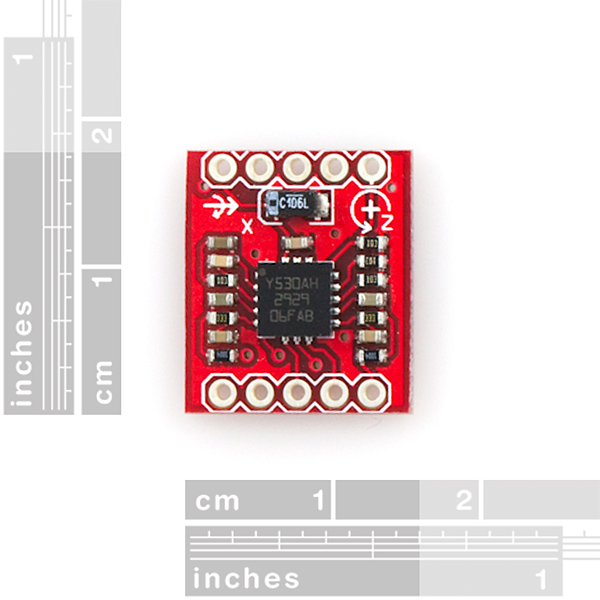
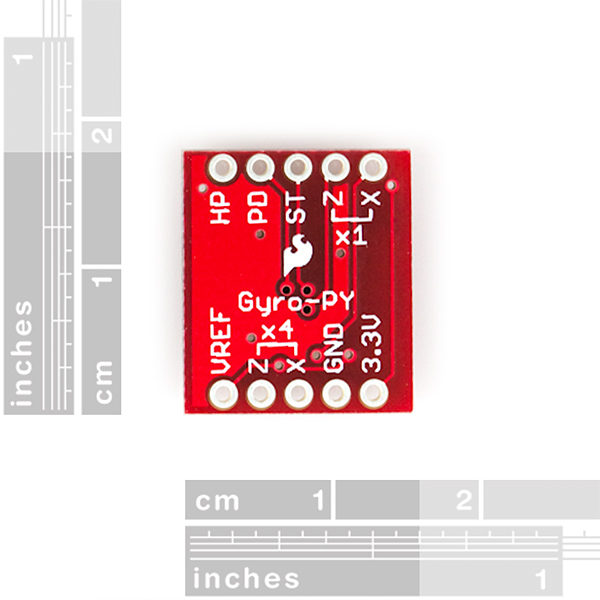
This breakout board includes the gyro and all necessary filtering capacitors as shown. The 1x and 4x amplified outputs of both axes are connected to the 0.1" pitch headers, along with the power-down, self-test, high-pass filter reset, and power pins.
We put the LY530ALH on our LPY5xxx gyro breakout boards. Don't be tricked by the pin-out, the x-axis outputs will not work.
Not sure which gyro is right for you? Our Accelerometer and Gyro Buying Guide might help!
**Note: **Some users have found that the high pass filter on this breakout board causes the output to be incapable of being integrated. A revision is coming that will have R5 and R8 removed and replacing C1 and C2 with a jumper.
- 2.7 to 3.6VDC power supply
- Yaw rotation sensing
- 1x and 4x amplified outputs
- Low power consumption
- All necessary filtering components included
- Access to power-down, self-test, and high-pass filter reset pins
- 0.6x0.7"
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
About the revision (will have R5 and R8 removed and replacing C1 and C2 with a jumper), it's done?
I would like to know the exact dimensions and position of the pad's of this board? Are there some eagle/kicad files available?
So, the High Pass filter on this is broken. If you get this, you'll need to desolder some components. There's a forum thread here that discusses the problem:
http://forum.sparkfun.com/viewtopic.php?f=14&t=18247&hilit=LPR530AL
I could not find a tutorial for this and was hesitant ... But it works great :) .
http://www.roboticsindia.com/entry.php/27-Balancing-Robot-Accelerometer-Gyro-Arduino-Processing-%28-Step-1-%29
I'm a little bit confused... By looking at the gyros sparkfun has, most of the 300 degrees/sec gyros cost less than say the 50 degrees/sec. Wouldn't MORE degrees/sec make it more usable, thus (generally) more expensive? It just seems that way to me...
A wider range means a lower resolution. It's a trade-off and it's probably more difficult to manufacture high-resolution parts because you'd basically need to lower the noise of the entire system.
I believe the link to the schematic should be to the Pitch-Yaw variant rather than then Pitch-Roll one.
http://www.sparkfun.com/datasheets/Sensors/IMU/ST-DualGyro-PY-Breakout-v10.pdf