- Home
- Product Categories
- Sensors
- Gyro Breakout Board - LPR503AL Dual 30°/s

{kind=link}
Gyro Breakout Board - LPR503AL Dual 30°/s
Replacement: None. There is no direct replacement for this board. This page is for reference only.
This is a breakout board for the ST's dual-axis LPR503AL gyro. The LPR503AL measures angular velocity along the pitch and roll axes with a full scale of ±30°/s. Two different analog outputs are provided for both the x- and y- axes - one 1x amplified and the other 4x amplified.
A regulated voltage between 2.7 and 3.6VDC should be supplied to the power pins. We have the filtering circuits all set up; you'll just need to connect the outputs to an ADC, and you're ready to go.
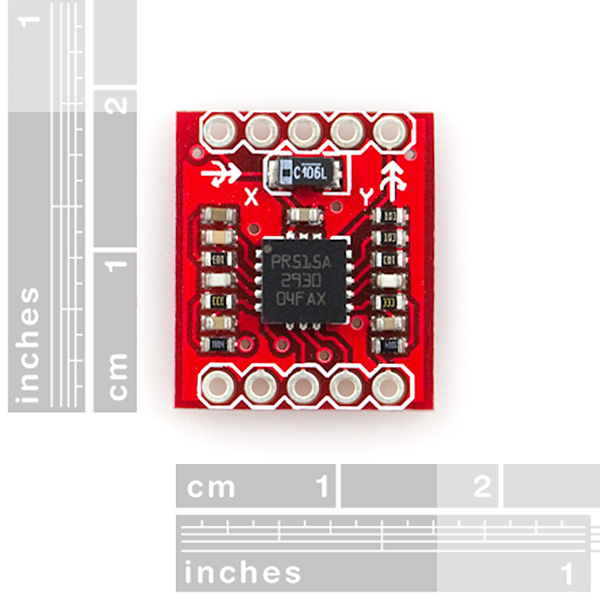
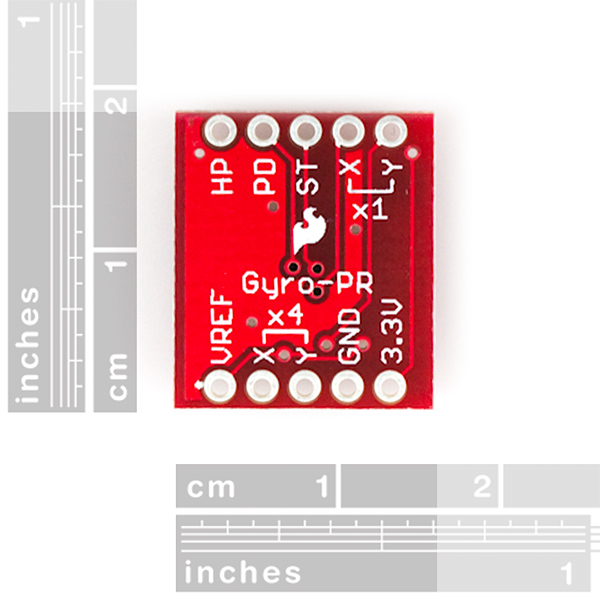
This breakout board includes the gyro and all necessary filtering capacitors as shown. The 1x and 4x amplified outputs of both axes are connected to the 0.1" pitch headers, along with the power-down, self-test, high-pass filter reset, and power pins.
Not sure which gyro is right for you? Our Accelerometer and Gyro Buying Guide might help!
- 2.7 to 3.6VDC power supply
- Dual axis, pitch and roll sensing
- 1x and 4x amplified outputs for each axis
- Low power consumption
- All necessary filtering components included
- Access to power-down, self-test, and high-pass filter reset pins
- 0.6x0.7"
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
The schematic says the HPF is 0.5 Hz. My calculator says it is 0.03 Hz.
Also, there are no pin numbers on the schematic so you will have to refer to the datasheet to know how the chip is wired. Hopefully, the pinouts are per the datasheet, but there is no way to know for sure without reverse engineering the PCB.
hello all..
Iam using LPY5150AL Breakout gyro. I have connected to a PIC16F877A microcontroller.The problem is that iam getting outputs of gyro around 1100 -1300 deg/sec when i rotate the axes.I donot know whether these values are correct are not??can anyone help me out..!
The formula used is:
X_deg=((V_out-V_reference)*5000/1024)/(sensitivity)
where v_ref=1.23 as suggested in datasheet.
THANKS ALOT..!
is the ?30?/s for the 4X amplified outputs, or the 1X output?
I am not able to make this gyro works , I have unstable reading from all outputs (like noisy reading or something )
this is the way I connected it
VCC 3 volt
GND GND
Vref NC
ST & PD & HP also NC
I also tried to pull HP pin high , nothing changed
me too, im getting noisy readings.. did u manage to fix the problem?