- Home
- Product Categories
- Sensors
- Gyro Breakout Board - LPY5150AL Dual 1500°/s

{kind=link}
Gyro Breakout Board - LPY5150AL Dual 1500°/s
Replacement: None. We don't carry a direct replacement for this part but take a look at our gyro category for more 2-axis gyros. This page is for reference only.
This is a breakout board for the ST's dual-axis LPY5150AL gyro. The LPY5150AL measures angular velocity along the pitch and yaw axes with a full scale of ±1500°/s. Two different analog outputs are provided for both the x- and z- axes - one 1x amplified and the other 4x amplified.
A regulated voltage between 2.7 and 3.6VDC should be supplied to the power pins. We have the filtering circuits all set up; you'll just need to connect the outputs to an ADC, and you're ready to go.
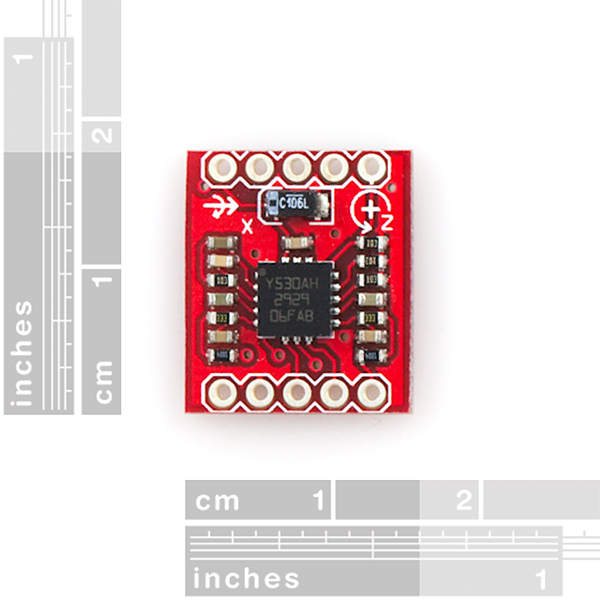
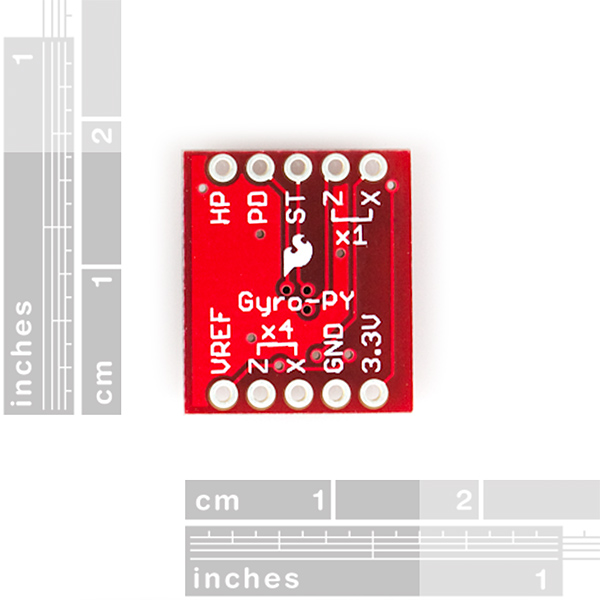
This breakout board includes the gyro and all necessary filtering capacitors as shown. The 1x and 4x amplified outputs of both axes are connected to the 0.1" pitch headers, along with the power-down, self-test, high-pass filter reset, and power pins.
Not sure which gyro is right for you? Our Accelerometer and Gyro Buying Guide might help!
- 2.7 to 3.6VDC power supply
- Dual axis, pitch and yaw sensing
- 1x and 4x amplified outputs for each axis
- Low power consumption
- All necessary filtering components included
- Access to power-down, self-test, and high-pass filter reset pins
- 0.6x0.7"
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
hi
I am using the LPY5150 on a PCB with SiLabs uController (f340). The problem i get is that the voltage output at 1x, 1y, 4x and 4y keeps dropping continuously i.e. first they read 1.23V then they start dropping to .59V. The vref remains constant at 1.23V. Can anyone help with this problem?
My configuration of the IC is as follow:
ST(11) -> GND
HP(13) -> GND
PD(12) -> GND
VCC (14,15,16) -> 3.3V with 0.1uf and 10uf capacitors.
Low pass filter is implemented as per above schematic.
Vref(7) -> is open
FIL TVDO(2) -> OPEN
CONT(3) -> OPEN
any help ?
i have connected LPY5150 Breakout board like this:
Vcc----------->3.3 volts.
GND---------->Gnd.
ST,PD,HP----->gnd.
1x---------->Not connected.
outputs 4x-->Connected to analog pins of PIC16F877A.
vref-------->connected to analog pin of PIC.
iam reading three values 4x- X,Z and Vref.
Isn't that a 5V micro? This gyro emits an analogue voltage at a 3.3v logic level.
iam using a voltage regulator to convert the 5V to 3 volts.
I got some values from gyro which i need to integrate to get angle.Does this gyro allows integration?In some forum i saw that there is a problem with HP filter.Is it true?
hello all..
Iam using LPY5150AL gyro. I have connected to a PIC16F877A microcontroller.The problem is that iam getting outputs of gyro around 1100 -1300 deg/sec when i rotate the axes.I donot know whether these values are correct are not??can anyone help me out..!
The formula used is:
X_deg=((V_out-V_reference)*5000/1024)/(sensitivity)
where v_ref=1.23 as suggested in datasheet.
THANKS ALOT..!
hello all..
Iam using LPY5150AL gyro. I have connected to a PIC16F877A microcontroller.The problem is that iam getting outputs of gyro around 1100 -1300 deg/sec when i rotate the axes.I donot know whether these values are correct are not??can anyone help me out..!
The formula used is:
X_deg=((V_out-V_reference)*5000/1024)/(sensitivity)
where v_ref=1.23 as suggested in datasheet.
THANKS ALOT..!