- Home
- Product Categories
- GPS
- UAV v2 Development Platform

{kind=link}
UAV v2 Development Platform
Replacement:GPS-09980. The v3 board comes with a dsPIC30F4011 CPU, an MMA7260 three axis accelerometer, and two dual axis IXZ500 gyros (instead of three LISY300AL gyros with v2). The IXZ500 gyros have enough vibration tolerance to be used in RC heli applications. This page is for reference only.
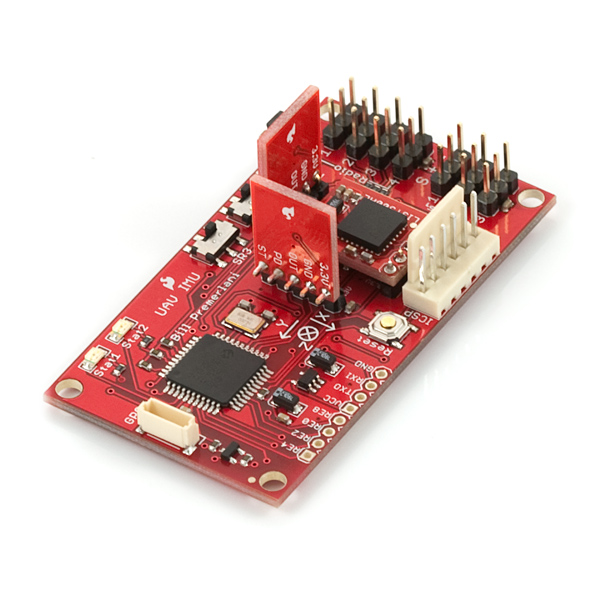
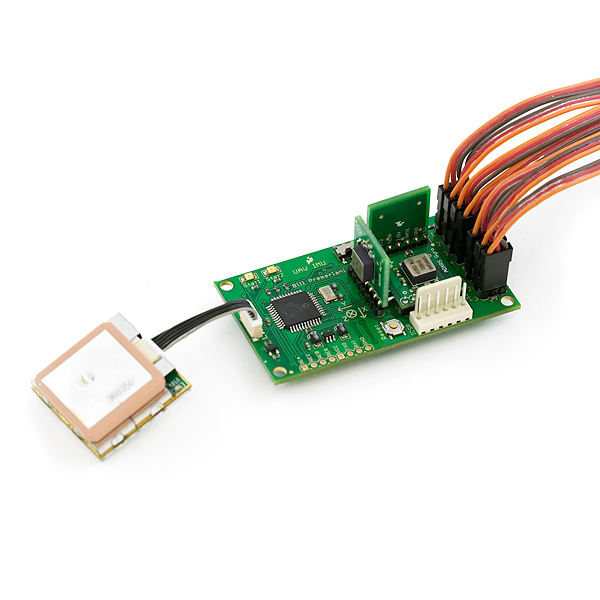
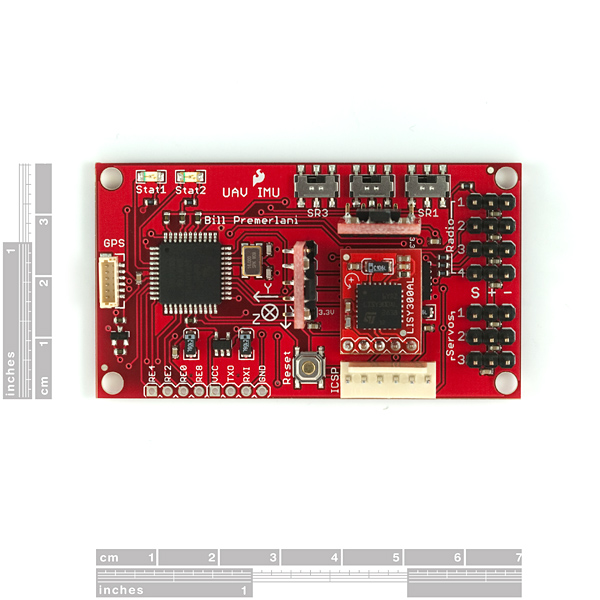
This is the new three axis UAV development board by Bill Premerlani. This board comes with a dsPIC30F4011 CPU, an MMA7260 three axis accelerometer and 3 LISY300AL gyros. It is intended for the do-it-yourselfer. By itself, it can be used to develop a three axis IMU controller. With the addition of an EM406 GPS receiver it can be used to develop a UAV controller for an RC car, plane, or boat. It comes with self-testing firmware that can serve as a starting point for you to develop your own control and navigation firmware. There is also fully functional, open source autopilot firmware available.
The board also supports a connection to the faster and more accurate UBlox GPS module. The easiest way to connecto to the GPS is with this adapter.
We suggest using the PICkit2 or PICkit3 to program the board. You will also need a cable DEV-00611 and a 6-pin header PRT-00131. See example connection photo to the right.
**Note: **On the 6 pin debug header, the pin next to the reset button is VPP, according to this convention.
{kind=link}
Weight: 34 grams (controller and GPS)
- Connection for either a 20-Channel EM-406A SiRF III GPS Receiver or 50-Channel GS407 Helical GPS Receiver (receivers not included)
- PIC dsPIC30F4011 Controller (with onboard 3.3V and 5V glue logic)
- dsPIC runs at 120MHz with 16MHz resonator and PLL
- MMA7260 three axis accelerometer
- 3 LISY300AL gyros
- Up to 5 Input, 6 output PWM points
- 6-Wire debug header or ICSP header
- 2 Separate colored status LEDs
- 3 General purpose switches
- On board 3.3V and 5V regulators (150mA max)
- 10m Positional Accuracy / 5m with WAAS
- Spare USART connection for debugging, flight logging, wireless telemetry, etc.
- 4 Spare digital I/O pins for debugging
- 1.5 x 2.75 x 1.0"
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
This article how to get the price and how to make reservations
I think this product should be moved to Sensors-IMU category.
You have a good point. This is one of those products that is kind of fuzzy as to what category it should be in; our justification is that this product's purpose is mostly as a GPS evaluation and development platform, but it certainly could fit in several other categories.
Maybe we should just go with the numbers?
Hi Mike,
Have you considered creating a separate category for do-it-yourself UAVs, with the UAV Development board and the ArduPilot in the category?
Best regards,
Bill
Hello,
This item can be stabilise a Rc plane automatically? an if i put a GPS can I give target to the rc plane and the rc plan can fly without me ?
Exemple I takes off , I put the autopilote ON and the plane go to the target GPS automatically?
It is possible with this Item ? there are already Code for do that ? or a I do to devlop all ( stabilisation, target, etc...)
Thank you for your help
Regards
Adrien
Hi Adrien,
There is firmware available for an autopilot.
Visit the following website for more information:
http://code.google.com/p/gentlenav/
Best regards,
Bill
That is possible, I believe there is sample code available somewhere, however I am not sure where. But the sample code will need some tweaking to work under your contraints.
PUBLIC SERVICE ANNOUNCEMENT: THIS UNIT WILL NOT WORK AT AN ALTITUDE OVER 18000 METERS (60000 FEET)
This unit uses a Sirf-III GPS chipset has a limitation that buyers should know about. THIS UNIT WILL NOT WORK AT AN ALTITUDE OVER 18000 METERS (60000 FEET). This doesn't matter to most people, but is important to hobbyists that take part in high altitude weather ballooning, amateur rocketry, etc. Someone I know mistakenly purchased a Sirf-based unit for ballooning and I'm hoping to save people from making the same mistake.
I'm going to post this in the comments section of all the Sirf-based Sparkfun products in the hope of saving someone from from making the same mistake. I apologize if the Sparkfun guys consider this spamming, that isn't my intent. It, also, isn't my intent to drive business away from Sparkfun. They have an awesome collection of GPS products and many of the other modules don't have this limitation.
Note that it's up to the user to add their choice of GPS receiver to this board. If you can procure one that has had the ITAR-specified limitations removed, they should work together just fine.
Thank you for your help!
Michele
Hi Entropia,
You can use either a PICkit2 or a PICkit3 to program the UAV DevBoard. I have one of each, and tested them out, they work fine. You can get them from www.microchip.com, also it may be that SparkFun will eventually stock them as well.
You can either connect the PICkit directly to the board or you can use a cable.
You you connect directly, you will have to disconnect servo 3 while you program, the servo cable will be in the way.
If you connect with a cable, you can use the Olimex cable sold by SparkFun. You will also need the ICSP header, sold by SparkFun, to connect the cable to the PICkit.
There are two ways to connect the header to the PICkit, one way will work, one way will not. If you get it the wrong way, you will not damage any components, but you will get a warning message from MPLAB saying that the device ID is wrong. In that case, turn the connector around.
Best regards,
Bill
Hello,
I have some questions about this board.
- In the description it seems that the capabilities of the PWM (servo signals?) are 5 inputs and 6 outputs. On the contrary, on the User Manual only 3 outputs / 4 inputs are available (like in the photo...).
- My goal is to build and stabilise a V-22 Osprey-like rc-model. The basic idea was to use XbeePro for data trasmission (instead of conventional rc radio) and use the IMO to perform the stabilisation. I own this board:
http://www.dontronics-shop.com/990005-xbee-multi-interface-board-with-pic18f2520.html
that is basically a servo controller linked to a XBeePro module. Which configuration do you suggest me? Using the IMU to directly control servos (I will need some mixers then, because the outputs are only 3 channels!) or maybe it possible to link the MuIN board to the UAV v2 IMU and let the MuIN do the mixing between servos?
Hi Entropia,
Regarding the number of PWM inputs and outputs, the spare pins provide the extra channels. The user's manual was written before Ben Levitt figured out how to use the spare pins to raise the totals from 4 inputs and 3 outputs to 5 inputs and 6 outputs. For more information on that, visit the project website and click on the Wiki tab. The URL is:
http://code.google.com/p/gentlenav/
If you would like to discuss your ideas for your V-22, you also might want to join our discussion group:
http://groups.google.com/group/uavdevboard
You will need something to program the board. Presently, there is nothing available at SparkFun. For more information about what programmers you can use, see the following discussion:
http://www.diydrones.com/profiles/blogs/programmers-for-the-uav
Thank you for the information!
I'm reading tons of posts in the discussion group now :)
No problem for the out of stock issue, I will either order from microchip the PicKit3 (it seems to be a very good compromise!) or wait for sparkfun to be back in stock.
The only problem is that I'm from France, so I'm afraid of custom...
I'm beginning to build the airframe also, I will open a thread as soon as I have some material to show :)
Thank you for your support,
Michele
Judging by http://klabs.org/history/apollo_11_alarms/eyles_2004/eyles_2004.htm , it looks like the moon landing had about 1/12 a million instructions per second, or possibly 1/24th a million instructions per second.
The dsPic30 has about 30 mips, so it is at least 300 times faster. Yikes! Oh, and the lunars computer weighed 70 pounds and consumed 55 watts.
For information about the navigation challenges faced during the Apollo program, I highly recommend the following two books:
"Digital Apollo - Human and Machine in Spaceflight", David A. Mindell, The MIT press, ISBN 978-0-262-13497-2
"Journey to the Moon: The History of the Apollo Guidance Computer", Eldon C. Hall, AIAI press, ISBN 1-56347-185-X
I'd be interested to see a comparison of the size, cost, and accuracy of this board to the guidance systems on Apollo 11 for the first moon landing. Seeing this board made me wonder how far we are from being able to roll your own nav system for a moon landing...