- Home
- Product Categories
- Infrared
- SparkFun RedBot Sensor - Line Follower

{kind=link}
SparkFun RedBot Sensor - Line Follower
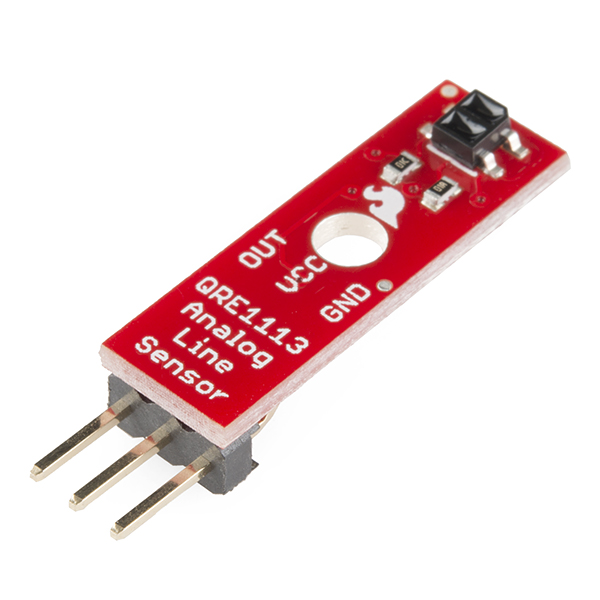
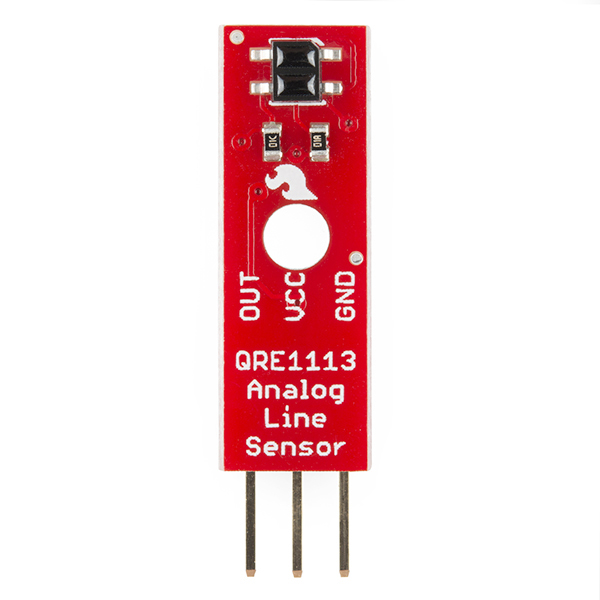
The Line Follower sensor is an add-on for your RedBot that gives your robot the ability to detect lines or nearby objects. The sensor works by detecting reflected light coming from its own infrared LED. By measuring the amount of reflected infrared light, it can detect transitions from light to dark (lines) or even objects directly in front of it.
The sensor has a 3-pin header which connects directly to the RedBot Mainboard via female to female jumper wires. Use the included RedBot library to detect lines or objects. A mounting hole lets you easily connect one or more of these to the front or back of your robot chassis.
Check out the entire RedBot family of products!
- 5VDC operating voltage
- Mounting hole
- 25mA supply current
- Optimal sensing distance: 0.125" (3mm)
- 0.32 x 1.18 " (8.22 x 30.14 mm)
SparkFun RedBot Sensor - Line Follower Product Help and Resources
Experiment Guide for RedBot with Shadow Chassis
May 28, 2015
This Experiment Guide offers nine experiments to get you started with the SparkFun RedBot. This guide is designed for those who are familiar with our SparkFun Inventor's Kit and want to take their robotics knowledge to the next level.
micro:bot Kit Experiment Guide
February 20, 2020
Get started with the moto:bit, a carrier board for the micro:bit that allows you to control motors, and create your own robot using this experiment guide for the micro:bot kit.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Noob - You will be required to put together a robotics kit. Necessary parts are included and steps will be easy to follow. You also might encounter basic robotics components like bearings, mounts, or other hardware and need a general idea of how it goes together.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Rookie - You will need a better fundamental understand of what code is, and how it works. You will be using beginner-level software and development tools like Arduino. You will be dealing directly with code, but numerous examples and libraries are available. Sensors or shields will communicate with serial or TTL.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Noob - You don't need to reference a datasheet, but you will need to know basic power requirements.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.7 out of 5
Based on 7 ratings:
Excellent Value
I've used this product in a number of automation projects. The Line Follower meets the K.I.S.S. principle that I strive for in my projects. It is easy to implement, performs as advertised, robust and is priced right.
Great product
It works very well for us. We use it with our BoxBot robot. The student use a small piece of velcro to attach it to the underside of their robot.
It is very small and light and we have had no problems with them at all.
Great product for the cost
I used this on the bottom of my robot to find the black goal in a maze that was styrofoam green. Worked perfectly with a very simple analog read on the OUT pin. The only problem I could see is that it needs to be a constant distance from the surface (between about 0.5cm and 2cm). Changing the distance to the surface significantly changes the output. But your robot should not be bouncing up and down in line following scenarios anyway, so great product!
Nice compact line following sensor at a reasonable price
I received a RedBot kit which was missing the line sensors so I bought these which normally come with the robot kit. They work great. They provide great detection between white and black surfaces. The kit calls for 3 sensors which is just enough to detect the line is present in the middle or crossing right or left.
Great Product
Works great. Used two on the robot to follow a line.
Does what it is supposed to do.
I am using them to build a quadrature decoder. I have them pointing against a white disk with black lines done on a laser printer. I was afraid I was going to have to put a comparator on each sensor, but the natural logic levels of my receiving device (an ASIC) matches the outputs of the sensor. And I am pleased to see this product has a mounting hole! So many SFE parts do not :( Only issue is that a full size #4 washer comes awfully close to the 2 SMT resistors if you have the head on the fastener on the sensor side. Solution is to use a smaller OD washer.
Hello, I have a bunch of these sensors and I hooked them up to my Arduino Uno. I have measured the voltage and the current drawn from the 5v source and I got these values: * Vcc = 4.94V * Icc (current through the Vcc line) ~= 36mA I have noticed that the back of the sensor, right beneath the optic cell, gets significantly hot. I have tried 4 different sensors and all exhibit the same behaviour. Is this normal? or should I get worried?
Other than that, the sensor works as expected. Tested with different surfaces and different distances to the surface and it performs perfect. I was not able to measure the actual temperature with a probe but it feels pretty hot when I touch it with my finger. Double checked the connections, just to make sure all is good.
Best regards, Dan
That's not uncommon; it takes quite a bit of light to ensure a good reading out of these, which means quite a bit of current. It should never smoke or "smell hot" however.
thank you.
Will this product allow the redbot to follow light similar to a Solarbotics mousebot? If not, what component would you recommend to allow the redbot to follow an intense flashlight beam?
Would it be necessary to use a low pass filter in conjunction with this device in order to deal with the frequency of florescent light?
So, if one were to put a stripe pattern on the inside of the wheel hub, or inside edge, you could use this as a motor speed sensor yes?
Yes you could, since it measures reflectance changes caused by things such as pencils, pens, and markers.
what is the difference? https://www.sparkfun.com/products/9453
nothing really, just form factor.