- Home
- SparkFun Block for Intel® Edison - Dual H-Bridge

{kind=link}
SparkFun Block for Intel® Edison - Dual H-Bridge
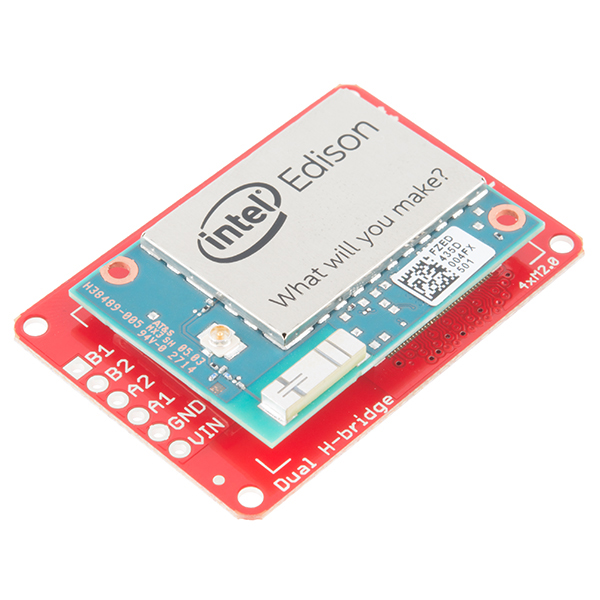
The Intel® Edison is an ultra small computing platform that will change the way you look at embedded electronics. Each Edison is packed with a huge amount of tech goodies into a tiny package while still providing the same robust strength of your go-to single board computer. Powered by the Intel® Atom™ SoC dual-core CPU and including an integrated WiFi, Bluetooth LE, and a 70-pin connector to attach a veritable slew of shield-like "Blocks" which can be stacked on top of each other. It's no wonder how this little guy is lowering the barrier of entry on the world of electronics!
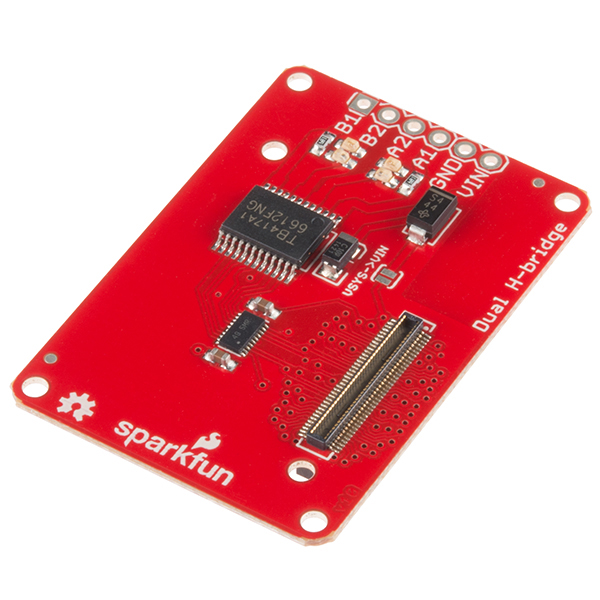
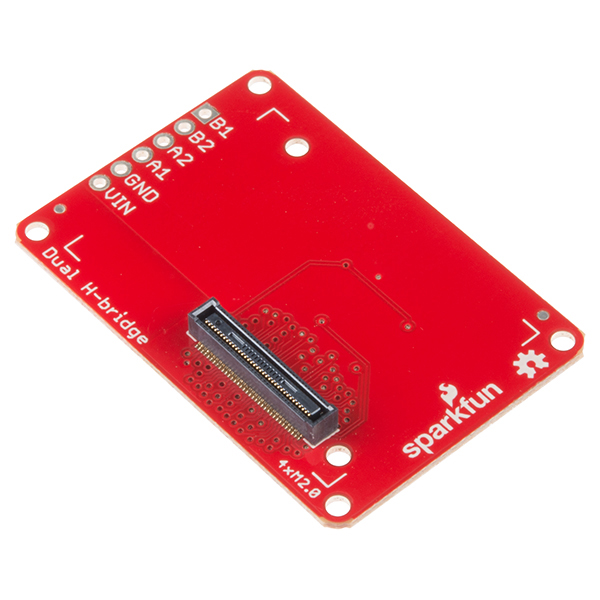
The Dual H-bridge Block gives the Edison some ability to move when paired with two DC motors. This board can drive two DC motors at voltages ranging from 2.7V-15V and currents up to 1amp. This board is isolated from the Edison using a logic level converter. To use this board external power for the motors will be required. Power for the motors is supplied on the headers labled "VIN" and "GND".
If you are looking to add a little more stability to your Intel® Edison stack, check out this Hardware Pack. It will provide you with increased mechanical strength for stacking Blocks on your Edison!
SparkFun Block for Intel® Edison - Dual H-Bridge Product Help and Resources
SparkFun Blocks for Intel® Edison - Dual H-Bridge
July 17, 2015
A quick overview of the features of the Dual H-bridge Block.
Edison Getting Started Guide
December 5, 2014
An introduction to the Intel® Edison. Then a quick walk through on interacting with the console, connecting to WiFi, and doing...stuff.
Programming the Intel® Edison: Beyond the Arduino IDE
January 7, 2015
Intel's Edison module goes beyond being just another Arduino clone. Check this tutorial for advice on how to get the most out of your Edison by writing code in C++!
General Guide to SparkFun Blocks for Intel® Edison
January 5, 2015
A general guide for using SparkFun Blocks for Intel® Edison in your next project!
Loading Debian (Ubilinux) on the Edison
December 5, 2014
How to load a Debian distribution (specifically Ubilinux) onto the Edison.
Installing libmraa on Ubilinux for Edison
January 5, 2015
libmraa is a tool kit for interacting with various Intel single board computers.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Noob - You will be required to put together a robotics kit. Necessary parts are included and steps will be easy to follow. You also might encounter basic robotics components like bearings, mounts, or other hardware and need a general idea of how it goes together.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
If anyone is interested I made a Node.js version of the C++ Library for this board. Can be found here: https://github.com/jmwendt/TB6612
It also includes an example for driving a two wheel cart around from a web browser.
Can you please make a Quad H-Bridge?
Is there, or will there be a compatibility table for the Edison blocks? Will there be any intersection in the Edison pins that are used by the blocks?
For example if the H-Bridge block and 9-DOF blocks have common pins, ie, both use GP47 for example, then both blocks could not be used in a design, correct?
We tried to take that into consideration. We are working on a table that shows all potential conflicts between boards.
I prepared the library for the controlling this block by the Python. It is here: https://github.com/jipech/SparkFun_H-Bridge_Block_for_Edison_Python_Library
There is a "VSYS -> VIN" jumper on this board. Is this to allow us to power the Edison from VIN of this board (assuming 3.3-4.5V), or to allow the Edison's power to power the motors?
The only reason I presently need the GPIO board is to provide power; I'd like to do away with it in my project. If I could power the motors and the Edison via the H-Bridge that'd be awesome. 4V is fine for my motors.
There is a diode that will prevent you from back-feeding VIN to the Edison. If you remove an jumper this diode VIN on the H-bridge is VSYS on the Edison (Also closing the VSYS ->VIN jumper). We tried to make this difficult to prevent accidental deaths of Edisons.
Does this block use an "enable" input on the edison side? If so, is the enable pin wired to PWM capable pin on the edison side?
We use the TB6612FNG Pin connections (we will get schematics and board files soon):
Caseytherobot - I'm trying to convert all the input you had shown to Aduino I/O pins except pin GP15. I can't find anything say about this pin. can you help? I'm trying to write the code to the Edison by using Aduino IDE. Is it possible to write in Aduino or it have to be in Linux code? I had found this link but it didn't help since it's not mention about GP15 https://communities.intel.com/thread/60981
TB6612FNG Pin connections: Edison pins > Aduino IO pins PWMA - PWM0 > IO3; AIN2 - GP47 > IO17(A3); AIN1 - GP48 > IO7; STBY - GP49 > IO8; BIN1 -GP15 > ???????; BIN2 - GP14 > IO18(A4); PWMB - PWM1 > IO5;
Thanks, Doug
Thanks!
@SparkFun: Any word on when this becomes available?
Can two or more of these boards be stacked for independently driving more than two motors?
Would like to know that ^^ too.
Similarly, any chance of a version of this that supports 4 motors?
I had the same question about the 4 motors support. Anyone heard if this is gonna be a new version of this block coming out?
Well, we'll see.
ATM, no, to both of these questions. However, that may change before release.
Whether that's going to translate to massive changes in the design before release or to another product following hot on the heels of the first, I can't say right now.
Most likely no