- Home
- Product Categories
- DC/Gearmotor
- Hobby Gearmotor - 140 RPM (Pair)


{kind=link}
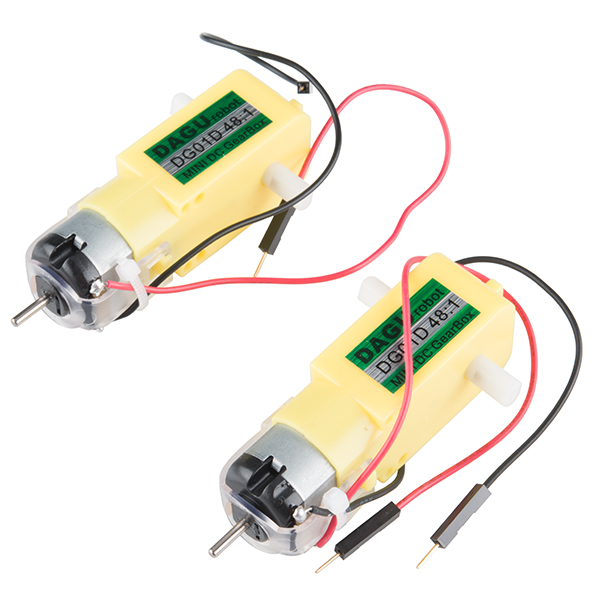
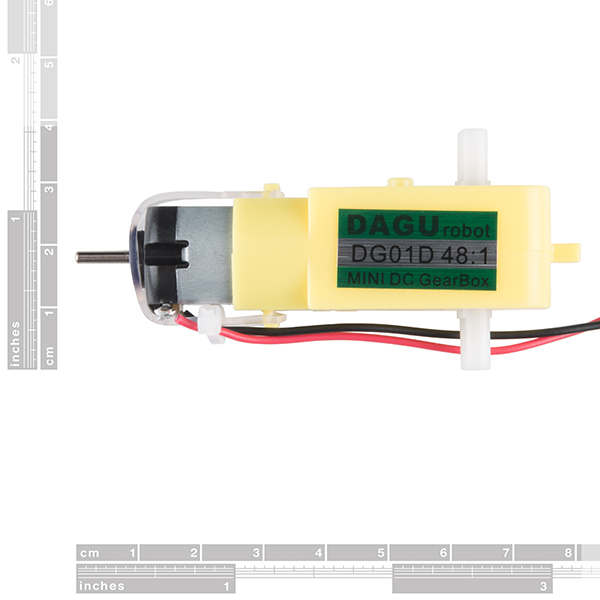
These are a pair of hobby gearmotors from DAGU. These gearmotors are the same ones recommended for use in the Shadow Chassis and offer a cheap and easy-to-use setup to get your wheels turning. Each Hobby Gearmotor also possess a 9mm long output on a straight axis.
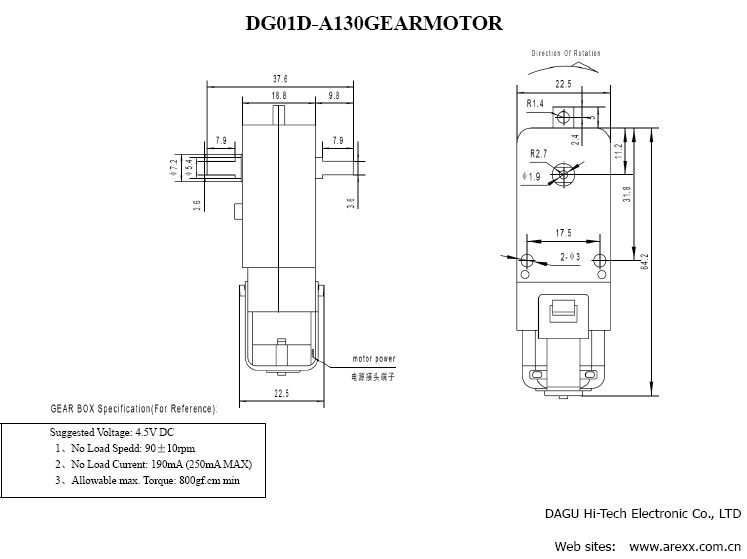
These gearmotors require a voltage of 4.5V with a no load current of 190mA while possessing a gearbox ratio of 48:1 and a wheel speed of 140 RPM unloaded.
Every motor order is sold in packs of two.
Note: The RPM listed in the datasheet below is listed as 90RPM. Based on our own testing we found the gearmotors can actually achieve a No Load Speed of about 140 RPM.
- Suggested Voltage: 4.5VDC
- No Load Speed: 140RPM
- No Load Current: 190mA
- Max. Load Current: 250mA
- Torque: 800 gf-cm
- Datasheet (DG01D)
{kind=link}
Hobby Gearmotor - 140 RPM (Pair) Product Help and Resources
Experiment Guide for RedBot with Shadow Chassis
May 28, 2015
This Experiment Guide offers nine experiments to get you started with the SparkFun RedBot. This guide is designed for those who are familiar with our SparkFun Inventor's Kit and want to take their robotics knowledge to the next level.
Ardumoto Kit Hookup Guide
April 14, 2017
Learn how to assemble and drive DC motors using the v2.0 Ardumoto Shield.
Red Box Robot Hookup Guide
November 23, 2016
Turn an iconic SparkFun red box into an obstacle-avoiding robot.
ReconBot with the Tessel 2
October 13, 2016
Build a robot with the Tessel 2 that you can control from a browser on your phone or laptop.
Serial Controlled Motor Driver Hookup Guide
November 17, 2016
Hookup guide for the Serial Controlled Motor Driver
Experiment Guide for the Johnny-Five Inventor's Kit
June 28, 2016
Use the Tessel 2 and the Johnny Five Inventors kit to explore the world of JavaScript enabled hardware through 14 awesome experiments!
WiFi Controlled Robot
May 2, 2018
This tutorial will show you how to make a robot that streams a webcam to a custom website that can be remotely controlled.
Assembly Guide for SparkFun JetBot AI Kit V2.0
March 27, 2020
Assembly Guide for the SparkFun JetBot AI Kit v2.0. This tutorial includes photos & comments to assemble the two-layer chassis & additional components unique to the JetBot kit.
Light-Seeking Robot
November 28, 2017
We use parts from the SparkFun Inventor's Kit v4.0 to create a light-seeking robot that mimics the behavior of single-celled organisms.
SparkFun Inventor's Kit Experiment Guide - v4.1
August 8, 2019
The SparkFun Inventor's Kit (SIK) Experiment Guide contains all of the information needed to build all five projects, encompassing 16 circuits, in the latest version of the kit, v4.1.2 and v4.1.
micro:bot Kit Experiment Guide
February 20, 2020
Get started with the moto:bit, a carrier board for the micro:bit that allows you to control motors, and create your own robot using this experiment guide for the micro:bot kit.
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Rookie - You will be required to know some basics about motors, basic motor drivers and how simple robotic motion can be accomplished.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
3.8 out of 5
Based on 6 ratings:
1 of 1 found this helpful:
Works ok for a while, but don't expect them to last forever.
As is common with a lot of things made in China, these simple motors with their plastic gear trains won't last forever. Tried using them for a project, but after a several hundred hours of use, they will die out. In my case, the motors would either spin very slowly as if someone had their thumb on the scale or they'd work sporadically. Sometimes the lights on my red board would blink indicating that power was being directed to them, but they wouldn't spin at all.
They're suitable for projects that don't require anything too durable or strong, but if you want something that will last longer, look into getting Sparkfun motors with gear trains made out of metal.
I'd personally like to have more options for made in USA electronic parts instead of China or at the very least made in Japan, South Korea or Europe.
This is the gear motor for your DIY encoders
Putting your encoders on the extra shaft of these motors is definitely the way to go. With a simple 4 blade optical interrupt encoder I'm getting very accurate distances. I get 384 ticks per wheel rev.
This is a WAY better setup than putting encoders on the output shaft. Finally a cheap robot that drives straight!
Leads not properly crimped…
Bought 4 of these for teaching demos. The lead wires are properly soldered at the motor end, but NONE of the black wire crimp on connectors at the other end were making electrical contact. The wires had not been stripped. Had to fix each one myself. Red wires were properly stripped and crimped…
Great motor
I purchased this to use in a 3D printed car I am designing and its narrow body has worked great and it was very easy to use. I also purchased the battery boxes and soldered the wires together - everything works great and my students are interested in how I did it and how THEY can do it too! THANKS Amy Fletcher
Pretty Awesome Little Motors!
I started buying the motor controllers to use with another project, and as an impulse buy grabbed some of these, they're amazing little motors for the price. I was surprised how much torque they were delivering. Now obviously not going to hold up like a full metal gear motor would, but definitely will find a use one some projects. OK, back to building the bots now :)
Motors performed as expected except when they didn't
We have used thousands of these motors in the past so we know exactly what we're getting when we buy them. This batch of a couple hundred had about 10 bad motors. About 5 of them had a lead missing and it appeared to have broken off at the solder and the other 5 had bad motors that would not turn on. The 5 that did not turn on, I removed the plastic strap to detach the motor and inspected the gearbox and motor, the gearbox was fine and it appears the motors are bad.
Is there a CAD file available?
The black and red wires on the gearmotors shown in the picture above look like mirror images (red/black then black/red), however mine look the same - meaning the wires colors are the same on the left and right on each gearmotor. Mine are both black on the left/top and red on the right/bottom when I place them facing the same way as the picture shown on the website - is this wrong? Do I need new ones? I don't think I can flip one over - I think they came already soldered on... plus my car just drives in circles.... help!
The colors are nice, but not always that useful. For a DC motor if you apply power it will spin in a certain direction. If you apply that power in reverse it will spin in the opposite direction meaning there is no "correct" way to connect it. So it depends on how you mount it and your code. If you have it mounted the way you want and don't want to fiddle with code I would just swap how the wires are connected to your motor driver.
Forgive my lack of technical language, but these look like they have one shaft coming out of the top and two that stick out of the sides. The top one is a long and skinny metal shaft and the other two look like plastic. My question is, do they all three spin?
Yes they all spin. The skinny metal shaft is typically used to add a wheel encoder. The wheel encoder allows you to determine how far you wheel has turned. This metal shaft turns at the same rate as the motor and is not effected by the gears. For this motor for every turn of the wheel (the plastic shaft) the metal shaft will turn 48 times (since its 48:1 gear box).
The other two plastic shafts are to attach a wheel. I only use one of these shafts to attach one wheel. The other plastic shaft goes unused in my robot.
What's the backlash like on these motors? Would it be small enough for a balance bot?
How would i go about mounting this to anything?
These were definitely not designed for ease of use. There are two through holes where the motor mounts to the transmission. I think they are 3mm. There is also a small tab at the center front of the gearbox with a hole. You need to use bolts or sometimes I just use 3/32 pop rivets if I am not planning to remove them. I can speak from experience that the gearboxes are made from some sort of high molecular weight plastic (I'm guessing polypropylene or polyethylene) and no glue will stick to them---I've tried pretty much all the choices. VHB tape might work for temporary installation.
Hurrah! Tail shaft! Thank you for enabling encoders. What is the diameter of the tail shaft?
Can these go forwards and backwards?
Yes.
Do they come pre-wired to connect to the RedBot mainboard?
The photo's don't show the wires....
You need to solder on the wires
What wheels can be used with these?