- Home
- Product Categories
- Imaging
- Pixy2 CMUcam5




{kind=link}
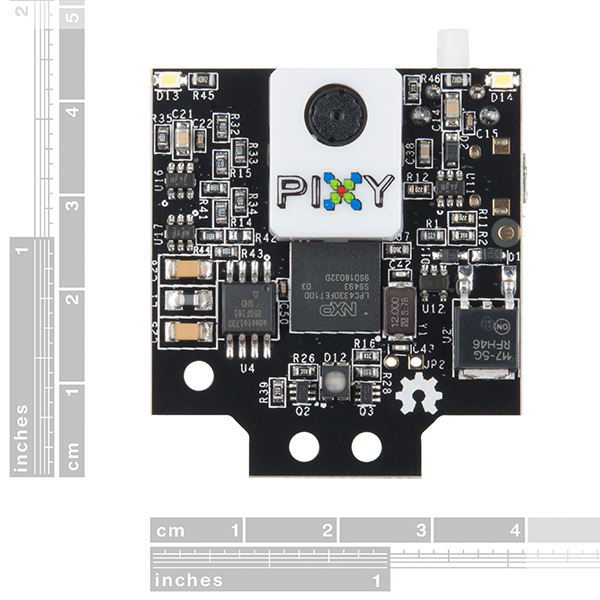
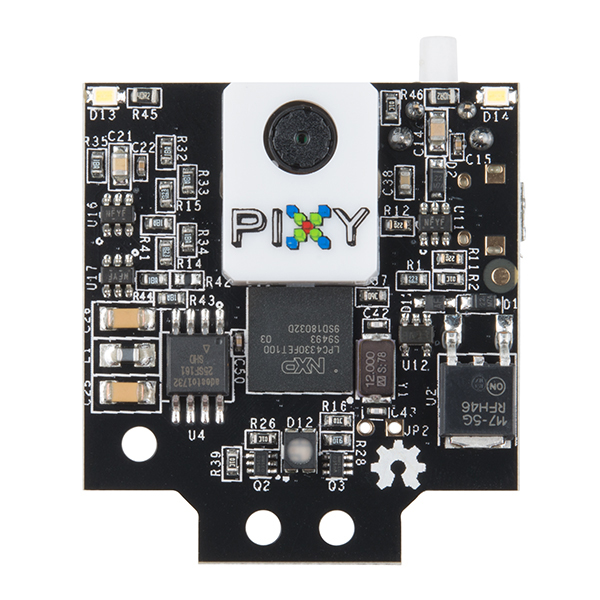
The Pixy2 CMUcam5 is smaller, faster and more capable than the original Pixy. Like its predecessor, the Pixy2 can learn to detect objects that you teach it, just by pressing a button. Additionally, the Pixy2 has new algorithms that detect and track lines for use with line-following robots. With these new algorithms, you can detect intersections and “road signs” as well. The road signs can tell your robot what to do, such as turn left, turn right, slow down, etc. The best part is that the Pixy2 does all of this at 60 frames-per-second, so your robot can be fast, too!
No need to futz around with tiny wires — the Pixy2 comes with a special cable to plug directly into an Arduino and a USB cable to plug into a Raspberry Pi, so you can get started quickly. No Arduino or Raspberry Pi? No problem! The Pixy2 has several interfaces including SPI, I2C, UART, and USB with simple communications, so you get your chosen controller talking to the Pixy2 in short order.
The Pixy2 uses a color-based filtering algorithm to detect objects. Color-based filtering methods are popular because they are fast, efficient, and relatively robust. Pixy2 calculates hue and saturation of each RGB pixel from the image sensor and uses these as the primary filtering parameters. The hue of an object remains largely unchanged with changes in lighting and exposure. Changes in lighting and exposure can have a frustrating effect on color filtering algorithms, causing them to break. Pixy2’s filtering algorithm is robust when it comes to lighting and exposure changes.
- 1x Pixy2 CMUcam5
- 1x Pixy IO to Arduino ISP Cable
- 1x Micro USB Cable
- 1x Mounting Hardware
- Processor: NXP LPC4330, 204 MHz, dual core
- Image sensor: Aptina MT9M114, 1296×976 resolution with integrated image flow processor
- Lens field-of-view: 60 degrees horizontal, 40 degrees vertical
- Power consumption: 140 mA typical
- Power input: USB input (5V) or unregulated input (6V to 10V)
- RAM: 264K bytes
- Flash: 2M bytes
- Available data outputs: UART serial, SPI, I2C, USB, digital, analog
- Integrated light source, approximately 20 lumens
- Dimensions: 1.5” x 1.65” x 0.6”
- Weight: 10 grams
Pixy2 CMUcam5 Product Help and Resources
Core Skill: DIY
Whether it's for assembling a kit, hacking an enclosure, or creating your own parts; the DIY skill is all about knowing how to use tools and the techniques associated with them.
Skill Level: Noob - Basic assembly is required. You may need to provide your own basic tools like a screwdriver, hammer or scissors. Power tools or custom parts are not required. Instructions will be included and easy to follow. Sewing may be required, but only with included patterns.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Rookie - You will need a better fundamental understand of what code is, and how it works. You will be using beginner-level software and development tools like Arduino. You will be dealing directly with code, but numerous examples and libraries are available. Sensors or shields will communicate with serial or TTL.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
5 out of 5
Based on 1 ratings:
1 of 1 found this helpful:
Really neat product - Doesn't work well for black or brown identification
I'm building a color sorter with the Pixy2, and it's a great way to get a vision system up and running quickly. Additional code, lighting, and filters are necessary to be able to view black or brown objects. I couldn't get the desktop software running on my 2013 Mac, but it was a breeze with an updated OS.
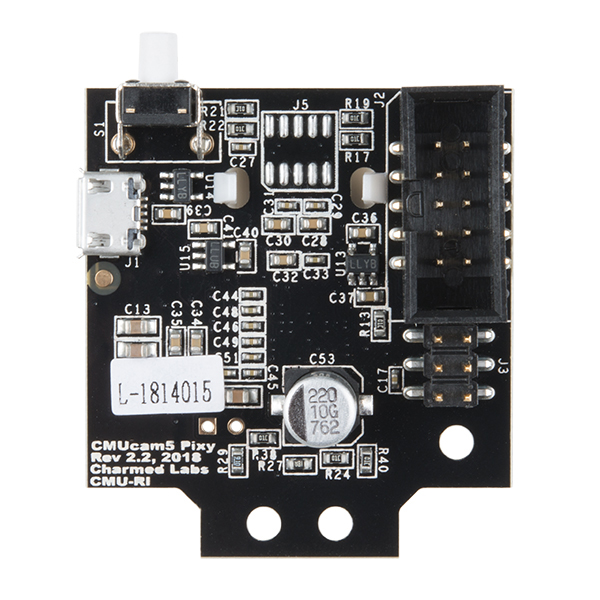
Anyone know what 'J5' is about on the back of the board? I'm hoping to be able to remove the camera module and tether one off board.
Whilst the original Pixy was great at object detection, getting the coordinates out was a nightmare though!!! We tried using it to detect 2 retro-flective markers, and whilst the detection of the markers worked fantastically, the I2C interface protocol to retrieve the data was so convoluted we eventually gave up since we couldn't do it reliably.
The biggest issue seemed to be that the data retrieved from I2C was basically a stream with supposed synchronization markers. You would expect this to be a great system, but the implementation simply didn't work reliably when trying to handle more than one object in a single video frame. It was also almost as though the coordinates were cleared out at the start of each video frame, so often you would read block data and it would return a zero coordinates and/or just flat out get out of sync.
I would really have liked a "capture" command, "status" command and a "retrieve coordinates" command.
I will look through the interface documentation. Hopefully they have moved away from the stream format and/or made sure that once you start to retrieve a frame set nothing else is updated until you finished.
That's one huge list of countries this can't ship to. Is there a reason for this?
So in general, this is almost meant for use in the autonomous vehicle competition? :)
I was a kickstarter backer of the original Pixy, and they had said face detection was 'coming soon'. As far as I know, it never happened. Will the pixy2 support face tracking?