- Home
- Product Categories
- IMU
- SparkFun Digital IMU Breakout - IMU3000

{kind=link}
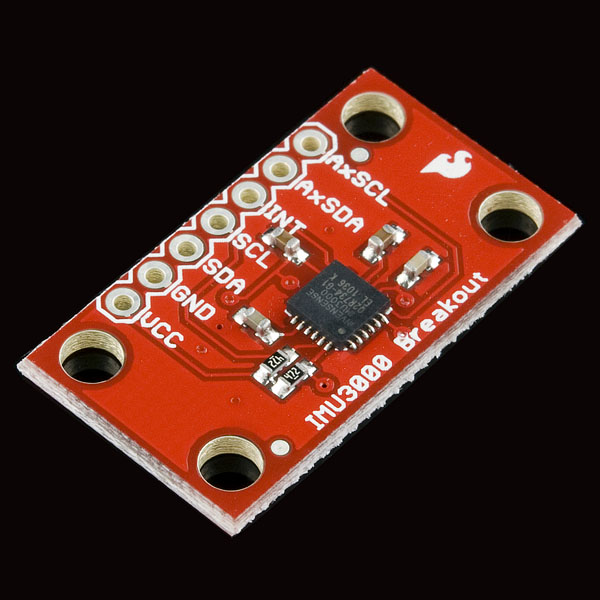
SparkFun Digital IMU Breakout - IMU3000
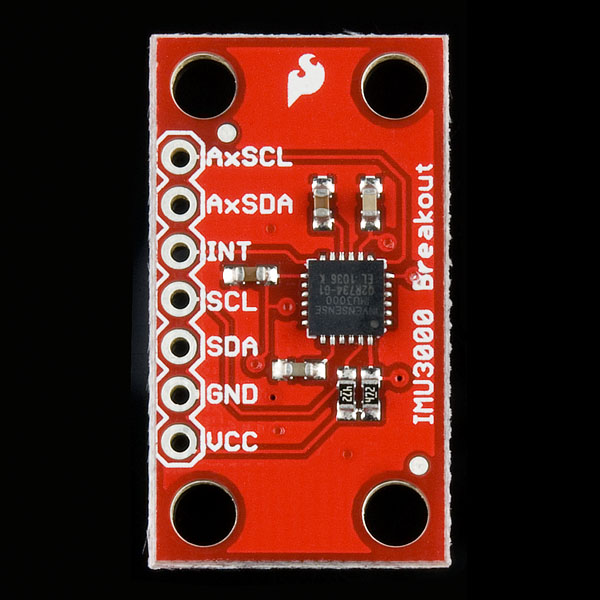
The IMU 3000 breakout features a 3-axis MEMS digital gyro with programmable ranges from +-250 to +-2000 degrees/sec. In addition, it has a secondary I2C port that interfaces with a digital accelerometer to deliver a complete 6-axis sensor output from its primary I2C port. The fusion output offloads the intensive motion processing computation requirements from the host processor, reducing the need for frequent polling of the motion sensor output and enabling low cost, low power microcontrollers.
We provide you with a simple board which breaks out the necessary pins on the IMU 3000 and provides for the primary I2C output as well as the secondary I2C input for an external accelerometer.
- Schematic
- Eagle Files
- Datasheet (IMU 3000)
- Product Page (IMU 3000)
SparkFun Digital IMU Breakout - IMU3000 Product Help and Resources
Core Skill: Soldering
This skill defines how difficult the soldering is on a particular product. It might be a couple simple solder joints, or require special reflow tools.
Skill Level: Noob - Some basic soldering is required, but it is limited to a just a few pins, basic through-hole soldering, and couple (if any) polarized components. A basic soldering iron is all you should need.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Noob - You don't need to reference a datasheet, but you will need to know basic power requirements.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
Is this product suitable for use in a DIY Segway? I'm just learning about IMUs and advanced sensors like this, so if anyone can tell me the cheapest option that will give me a decently accurate reading of the tilt (leaning forwards and back) it would be fantastic.
does it contain accelerometer or we need to connect external accelerometer?
Could I use this as an IMU in a plane, or do I need more DOF?
What about the MPU-6000, also from InvenSense? Cheap, same basic functionality, 6DOF unit with quaternion calculation, etc. It looks like a perfect upgrade from this.
It doesn't specify in the IMU_3000 datasheet, but with the ITG-3200 if I remember right(dataheet says to connect CLKIN to gnd if unused), CLKIN had to be grounded if not used before it would work. I'm sure somebody has tested these new boards.
Personally I was a bit disappointed with this chip when I read the datasheet compared to when it was first press released. The only thing this chip does is collect the accel data for you so you only manage one I2C, there's no actual processing. So the Digital Motion "Processing" name is a bit deceptive as the same can be achieved with mcu's with DMA's. Granted it does save you some power but for the average user this won't matter that much with home rockets lasting only a few minutes at best.
There's also no provision to do INT triggered read for the external accel, if you read the BMA180 datasheet it will tell you that to get the best performance out of it you should leave it alone until it generates an INT, as traffic on the bus can couple noise into it while its ADC was sampling.