- Home
- Product Categories
- Robotics Kits
- Pixhawk 4 Flight Controller









{kind=link}
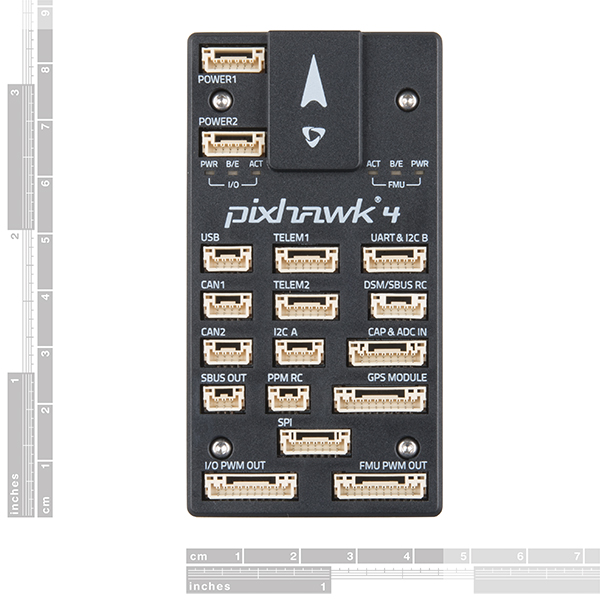
Pixhawk 4 Flight Controller
The Pixhawk 4 is an advanced development kit for the PX4 autopilot and is the latest update to the family of Pixhawk flight controllers. The flight controller has been designed and developed in collaboration with Holybro and Auterion, optimized to run PX4. It comes preinstalled with the latest PX4 firmware and features advanced processor technology from STMicroelectronics, sensor technology from Bosch, InvenSense, and a NuttX real-time operating system, delivering incredible performance, flexibility, and reliability for controlling any autonomous vehicle.
The Pixhawk 4's microcontroller has a 2MB flash memory and 512KB RAM. With the increased power and RAM resources, developers can be more productive and efficient with their development work. More complex algorithms and models can be implemented on the autopilot. The high-performance, low-noise IMUs on board are designed for stabilization applications. Data-ready signals from all sensors are routed to separate interrupt and timer capture pins on the autopilot, permitting precise time-stamping of sensor data. Newly designed vibration isolations enables more accurate readings, allowing vehicles to reach better overall flight performances.
The two external SPI buses and six associated chip select lines allow to add additional sensors and SPI-interfaced payload. There are total of four I2C buses, two dedicated for external use and two grouped with serial ports for GPS/Compass modules.
- 1x Pixhawk 4
- 1x Pixhawk 4 GPS Module
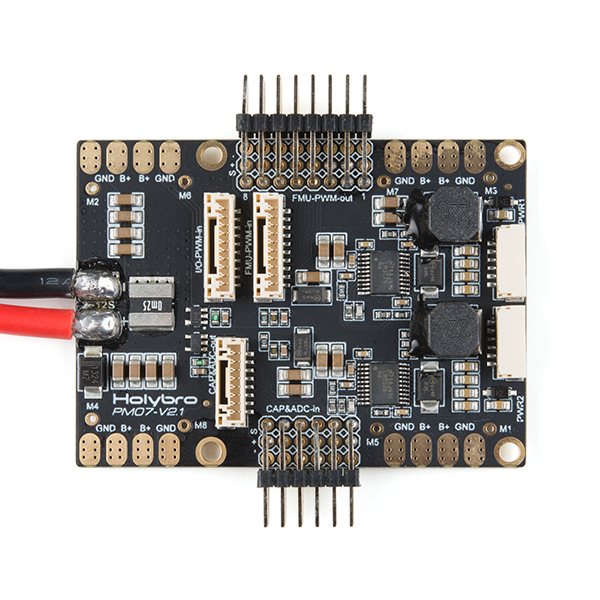
- 1x Pixhawk 4 Power Management Board
- 1x I2C splitter Board
- 3x 6 to 6 pin cable (Power)
- 2x 4 to 4 pin cable (CAN)
- 1x 6 to 4 pin cable (Data)
- 2x 10 to 10 pin cable (PWM)
- 1x 8 to 8 pin cable (AUX)
- 1x PPM/SBUS out cable
- 1x XSR receiver cable
- 1x DSMX receiver cable
- 1x SBUS receiver cable
- 1x USB cable
- 1x 'X' type folding pedestal mount
- 2x 70mm & 140mm carbon rod stand off
- 1x 6x3 2.54mm pitch Horizontal Pin
- 1x 8x3 2.54mm pitch Horizontal Pin
- 1x Foam Set
- 1x Pixhawk 4 Quick Start Guide
- 1x GPS Quick Start Guide
- 1x Power Management Board Quick Start Guide
- Main FMU Processor: STM32F76 (32 bit ARM® Cortex® M7, 216 MHz Processor running NuttX RTOS, more computing power and 2X the RAM than previous versions)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Redundant power supply inputs and automatic failover
- External safety button for easy motor activation
- New sensors with higher temperature stability
- Multicolor LED indicator
- Integrated vibrations isolation
- High-power, multi-tone piezo audio indicator
- microSD card for long-time high-rate logging
- 16 PWM outputs
- Increased ease-of-use: pre-installed with most recent PX4 (v1.8)
Pixhawk 4 Flight Controller Product Help and Resources
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Competent - You may need an understanding of servo motors and how to drive them. Additionally, you may need some fundamental understanding of motor controllers.
See all skill levels
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Competent - You will be required to reference a datasheet or schematic to know how to use a component. Your knowledge of a datasheet will only require basic features like power requirements, pinouts, or communications type. Also, you may need a power supply that?s greater than 12V or more than 1A worth of current.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
5 out of 5
Based on 1 ratings:
So far so Good
No issues thus far with the pixhawk. Works as it should for a quad copter.