- Home
- Product Categories
- Other Motors
- Muscle Wire Actuator - NM706-Super NanoMuscle




{kind=link}
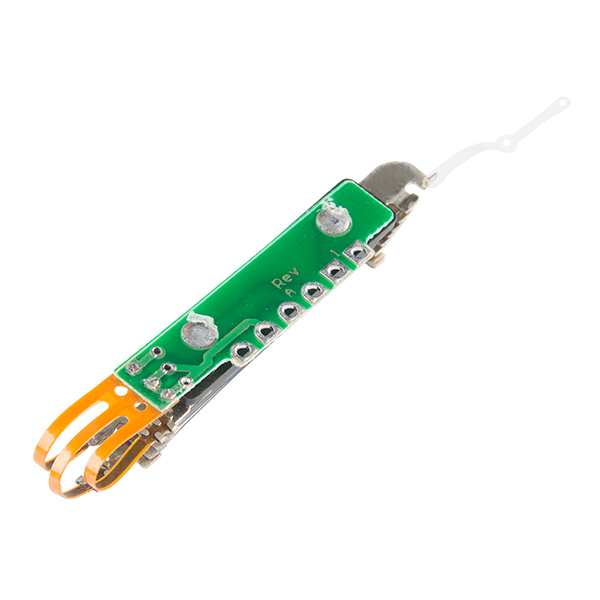
Muscle Wire Actuator - NM706-Super NanoMuscle
Another great linear actuator from Miga Motors. The NanoMuscle NM706-Super is a very small electric actuator that utilizes Shape Memory Alloy (SMA) with a 4.0mm stroke when exposed to 3.5V and 410mA. The amazing thing is this 1.1g device can move up to 70g!
Muscle Wire Actuator - NM706-Super NanoMuscle Product Help and Resources
Core Skill: Soldering
This skill defines how difficult the soldering is on a particular product. It might be a couple simple solder joints, or require special reflow tools.
Skill Level: Noob - Some basic soldering is required, but it is limited to a just a few pins, basic through-hole soldering, and couple (if any) polarized components. A basic soldering iron is all you should need.
See all skill levels
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Noob - You will be required to put together a robotics kit. Necessary parts are included and steps will be easy to follow. You also might encounter basic robotics components like bearings, mounts, or other hardware and need a general idea of how it goes together.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
These things definitely perform as advertised. And cheap, too! I got three of them for $9.95 each. Really hard to believe that something this small has this much pull! I've used little electromagnetic servos in some projects and they barely pull their own weight. I'm no high tech engineer. I was just wiring up a little circuit to pop open a latch on a wooden box. On the test run this thing actually tore itself loose from where I'd mounted it! (My fault, not the actuator's!) Anyway, as far as bang for the buck you can't beat these things. Oh yeah, the video on YouTube where this thing picks up bowling ball is a "Must See".
These consume lots of power though.
Hey Sparkfun, get your act straight. I spent three hours only to figure out that the datasheet you have linked is for an older model motor and the actual model is NM706-Super. This is very confusing and annoying!!
To help those from losing valuable time, here is everything you need:
http://www.migamotors.com/Media/NM706-Super-TechNote.pdf
Video please!!
I posted a video of a prototype clamp I made with it. It's handheld and thus kinda shaky, but you can at least see it move.
I had a 5v source and wanted to make sure I wouldn't damage the NM / draw too much current if I left it on, so I overcompensated with a 4.7 ohm resistor. If I do my arithmetic right (having measured 5.2 ohms for the NM), that leaves only 2.6v for the NM, which may contribute to its slightly slow response, as compared to Miga's demo video lifting a fishing weight.
Just some questions from an electronics novice hoping to buy-
The picture shows this thing operating with only a ground and a V+. Is that all you need?
Also, how far out does it actuate?
And lastly, does it return to its unactuated position when the charge isn't applied?
While you only need V+ and GND to heat the SMA wires to actuate, we recommend monitoring the Contracted pin and removing power when you hit it. This prevents overheating of the SMA wires, which can happen pretty quickly if you are using higher voltage (for faster actuation speed). At low voltages (~3V) you don't really need to monitor the Contracted pin.
There is no built in return spring, so the NM706-Super does not return by itself after the ~4mm actuation. The SMA wires just cool, and lengthen, so need to be 'pulled' back out to the starting position.
I made a small clamp using the NanoMuscle for my quadrotor. Pros: Easy to set up (just need on/off). Cons: Short stroke, much slower to respond in sub-freezing temperatures under the rotors' wash. Photos, videos, some more details.
As others have pointed out, SparkFun's photo (and what I got in the mail) is the NM706-Super, not the NM70 as the description says / what their datasheet link is for.
The foto with the connections on the site (https://dlnmh9ip6v2uc.cloudfront.net/images/products/8/7/8/2/NM70SimpleHookup.jpg) is not right, check the manual for the correct connection
Do I only need to connect wires to just the V+ and ground pins? Do I need an external power source other than an Arduino Uno? I got one of these last week and am kind of confused.
When connecting to the Arduino (powered by USB) for example set HIGH to pin A0, the voltage of the pin drops to 0.5 volts and it is not enough to control muscle.
Arduino pin can supply 20mA max by spec [if I recall correctly] and definitively not more than 40mA overspec.
This muscle needs 410mA, so you need to run it through a mosfet or something like that.
What is the pitch and number of circuits of the flex connector?
I bought three, they are not very strong, molested two already so I think I will stick with servos...
Has anyone figured out how the "Extended" and "Contracted" outputs function? I am guessing they are just potentiometers of some sort.
At the two ends of stroke (extended or contracted) the output stage contacts a pin sticking out of the PCB, shorting it to the voltage on the output stage. We recommend hooking it up so the output stage is at GND (V+ is on the center stage), so the Extended or Contracted pins will go to logic Low.
Do I need a control switch or any other components to work with this?
I will be using a Arduino or Netduino to activate.
TIA
J
i had bought the six pin nano muscle...the followin pin config was used:
pin 1 not connected
pin 2 ground
pin 3 +V 2.5 V to 9V
pin 4 Extended
pin 5 Contracted
pin 6 not connected
A AAA battery was connected , however no output was observed. Can anyone suggest where have i gone wrong? I have also tried connecting 9V battery but in vain. Do i have to attatch a resistor in series with my battery? Is the battery enough to provide the reuired current? Please help. Urgent
A AAA battery is much too low voltage. A 9v is too much. Goldilocks says ~3.5v is just right.
These little actuators are awesome!
Very strong and small, actually a bit too small for my project but I'm sure there will be a use for these little things.
I think they would be perfect for a robot that's supposed to climb a robe or has to be able to support his own weight in other situations. Did I already mention that they are surprisingly strong?
Just uploaded a new movie of an NM70 hoisting a 3 ounce lead fishing weight to:
http://www.migamotors.com/Downloads.html
Sorry for the low resolution...
Cheers,
Mark
Yeah, I'd love to see this thing in action. I can't find videos of it anywhere.