- Home
- Product Categories
- Robotics
- Micro Metal Gearmotor 100:1 (Sale)



{kind=link}
Micro Metal Gearmotor 100:1 (Sale)
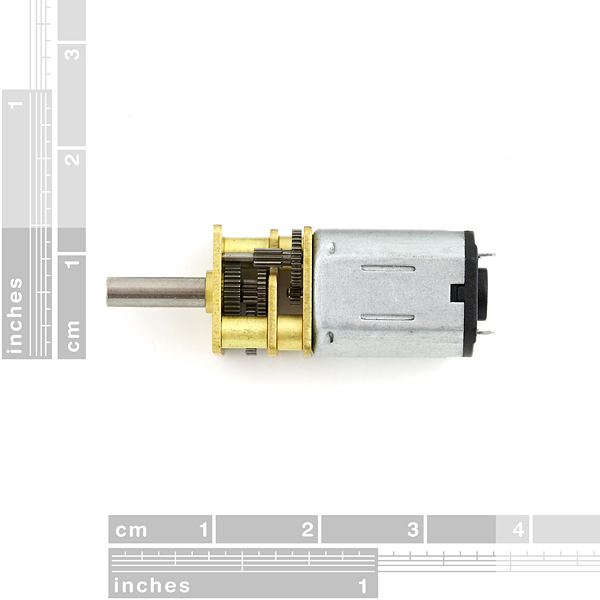
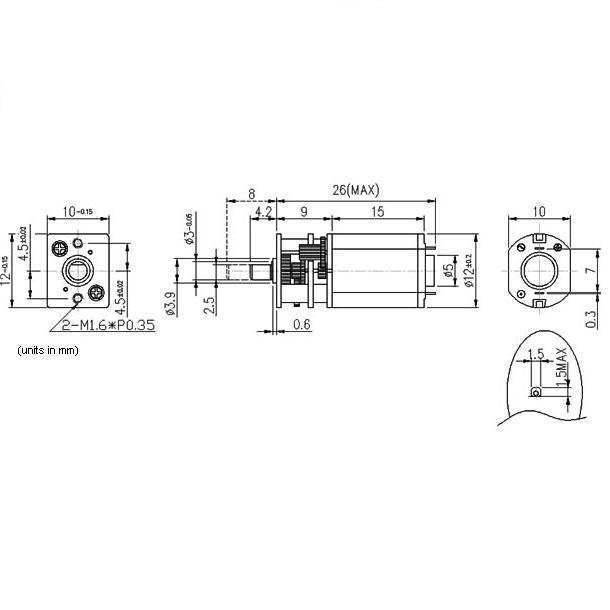
This motor has a long (0.365" or 9.27 mm), D-shaped metal output shaft that matches the Pololu wheel 42x19mm and 32x7mm. The brass faceplate has two mounting holes threaded for M1.6 screws (1.6 mm diameter, 0.35 mm thread pitch), or you can use the mounting bracket or extended mounting bracket, which are specifically designed to securely mount the gearmotor while enclosing the exposed gears. We recommend the extended mounting bracket for wheels with recessed hubs, such as the Pololu wheel 42×19 mm.
- 100:1 Gear ratio
- 120rpm @ 6V
- 30mA @ 6V
- 420mA stall current @ 6V
- 13 oz inches torque @ 6V
Micro Metal Gearmotor 100:1 (Sale) Product Help and Resources
Core Skill: Robotics
This skill concerns mechanical and robotics knowledge. You may need to know how mechanical parts interact, how motors work, or how to use motor drivers and controllers.
Skill Level: Rookie - You will be required to know some basics about motors, basic motor drivers and how simple robotic motion can be accomplished.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
For anyone who was interested, the force on this unit (at 6V) comes out to about 0.0706 Nm.
ironiridis isn’t 150g.cm equal to 0.0147Nm? (btw i’m using the data of the Datasheet)
Here's a video of a robot I built this weekend using two of these motors powered by an L293D IC with a 9V battery: http://www.youtube.com/watch?v=6hKtEQSAFKA. These motors worked out really well for this project.
These are a nice match with the Ardubot board. Use PWM to control the H-bridge, and you can run from about 25% to 100% duty cycle (60 - 255 on the analog write) on a 9V alkaline.
With the recommended wheels, it runs about at a slow walking speed, maybe 1-2 feet per second and 5-10 seconds to cross the kitchen.
anyone know how loud these motors are while running?
they make a little noise, but not much. maybe about the same as a 120mm computer case fan?
Time for a dumb question: is this motor reversible? The data sheet seems a little vague on this.
Yup, you can reverse them! You can see how we use these and similar gear motors for our Robot Joust in our tutorials.
Hi Sparkfun, as we're considering this motor for a production, we had a look to the Kinmore website (http://www.kinmoremotor.com/product_disp.php?productid=7&weblan=e) and we can't find the model listed by Sparkfun. It seems the only 1:100 geared motor is 240rpm instead of 120rpm, and the same for the 1:30 model which is rated 12V and 480rpm. Are the units you're selling here discontinued by Kinmore?
ironiridis isn't 150g.cm equal to 0.0147Nm? (btw i'm using the data of the Datasheet)
I bought two of these motors, unfortunately I messed one up trying to solder some wires to the leads. Before the leads even got hot enough to stick to the solder, the heat from the leads melted the surrounding black plastic. Maybe I didnt use the right method. I just touched the tip of the iron to the leads, touched the solder to it, before the solder melted the plastic did. Anybody got tips on how to solder wires on properly?
BTW, Im using lead free rosin core solder.
what is the accumulative backlash? and what is the diameter of the motor shaft?
Thanks for the question. I am not sure on the backlash, but the diameter of the shaft is 3mm.
Thanks
What is the weight of one of these units?
Thanks!
It weighs 0.34 oz (about 9.6 g).
Are these motors broken in already? If not, how would I do so? Also, is the torque rating taken at stall or spinning with load?
The motors do not need to be broken in; the torque rating is the stall torque.