- Home
- Product Categories
- Sensors
- Gyro Breakout Board - ADXRS610 - 300°/s

{kind=link}
Gyro Breakout Board - ADXRS610 - 300°/s
Replacement: There is no direct replacement for this board. Check out the gyro category for our other gyros. This page is for reference only.
The ADXRS MEMs gyroscope from Analog Devices is a great sensor. The BGA package has hindered users for long enough. You can now use gyroscope rate sensing in your own projects with this miniature breakout board from Spark Fun Electronics.
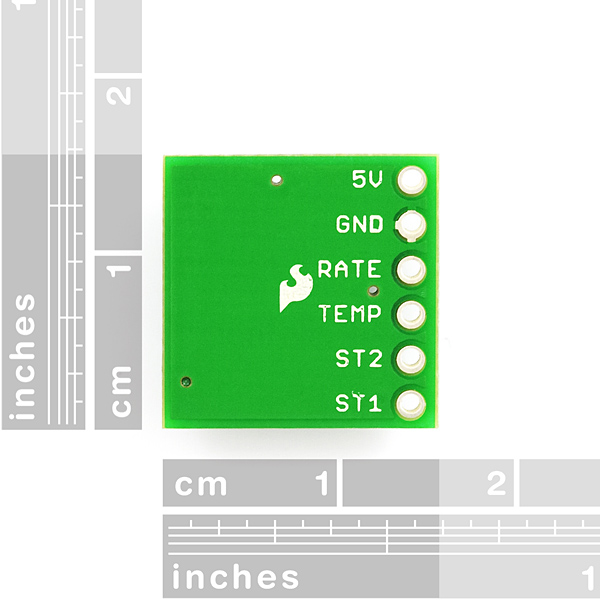
Units come fully populated and tested with an empty 0.1" spaced footprint ready for a straight header, right angle header (recommended), or your own wires/umbilical cable.
Not sure which gyro is right for you? Our Accelerometer and Gyro Buying Guide might help!
Weight: 1g without header
Resources and Applications (Inverted / reverse pendulum robots, Unmanned Aerial Vehicles, etc.):
- 0.60"x0.60" (15.25mmx15.25mm)
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
No reviews yet.
Use an acceleromter to measure tilt. "Measure" being the operative word you used. A Gyro does not measure tilt, it merely measures rotation rate. If the rate is integrated, then you can tell a relative change in tilt over a given time interval. Keep in mind I worte "relative change in tilt", because the starting state is arbitrary, and with integrated gyro measurements you then have a way to take a previous known tilt, and project forward as time progresses to have an idea of the new tilt. Why all this fuss? because accelerometer measurement quality suffers under the influence of vibration which corrupts the tilt measurement, but the ADXRSxxx gyros are practically immune to vibration. You need to apply proper RC filtering to the accelerometer output to dampen the vibrations, but not induce too much lag. At the same time the gyro is used to track relative changes in the tilt. Using accels and gyros together like this is done because they have complimentary properties. You'll need a fair amopunt of computation power and clean fast code to pull all this off. This is the stuff of a PhD thesis, typically, if you want to do it properly (there are lots and lots of complicating factors to handle).
On the other hand, a MUCH simpler thing to do if centrifugal forces are not at play as in some sensor for your desktop (as opposed to in a moving vehicle), is to simply use a 3-axis accelerometer (like the ADXL-330) and heavily RC filter the outputs to around 9 Hz cutoff. Then it's a matter of relatively simple trig to compute attitudes (tilts). This is what is done in the I-phone as far as I understand that device.
Thanks! I'm only a freshman in High school, so I love it when people who know what they're talking about give me good long explanations. I have Trig a while from now, so no complex code yet.
Why do not you sell them, anymore?
These are very good.
So if I want to measure tilt I want a gyro and not an accelerometer, right? I'm pretty sure this is right, but I've seen some projects where people measure tilt with accelerometers. Any help?